Clients registry¶
This page lists the main ‘official’ underworlds clients, that are of general use.
Several core clients are hosted directly in the main underworlds repository. The
others are typically hosted under the underworlds-robot GitHub
organisation.
Core clients¶
The core clients are hosted directly in the main underworlds repository.
uwds {ls, load, edit, show}: simple command-line tools to inspect and manipulate theunderworldsnetwork. Check their individual help pages for details.uwds view: a 3D renderer to display and inspectunderworldsworlds:
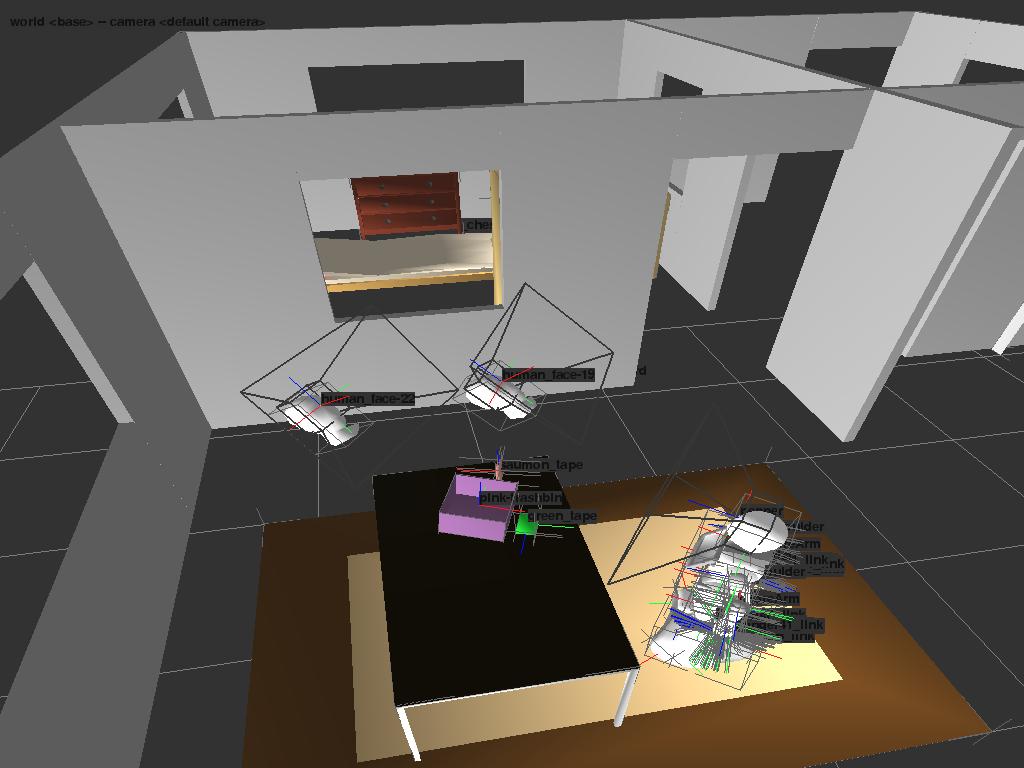
Screenshot of uwds view. Cameras are attached to the robots
and the human faces, and can be used to check whether objects are visible
from the point of view of a given agent.
uwds visibility: compute the list of visible objects, from each camera’s view point.uwds tf: bridges ROS tf withunderworlds– creates/updates ROStfframes in a givenunderworldsworld, with the option to select the desiredtfframes using a regex.
Note
Check as well the underwords Core Tools page for more details.
Community clients¶
Check each client’s README for details regarding usage/installation.
- perspective_filter: perspective taking & beliefs computation
- robot_monitor: monitor the robot from
/tfand an input world to provide an Underworlds output world with the input objects and the robot - env_provider: create an
underworldsworld from a static description of the environment - allocentric_monitor
- ar_object_provider: add
ar_tagobjects to the given Underworlds world - physics_filter:
underworldsfilter that use Bullet RT physics simulation to produce the near future of the intput world